Sobre o Controle Eletrônico dos Amortecedores da BMW e a Venda por Telefone de qualquer produto.
A BMW implantou há algum tempo o controle eletrônico dos amortecedores e eu nunca tinha ouvido falar sobre o assunto.

Um amigo meu apaixonado pelo carro me apresentou a tecnologia. Fez uma super explicação técnica que no final fez todo sentido. Foi bem assim...
“O Controle Eletrônico dos Amortecedores (EDC) combina o melhor nível possível de segurança na dirigibilidade com o máximo conforto na rodagem ou, se desejar, com um estilo de direção especialmente esportivo.
• As forças de amortecimento estão constantemente reguladas e ajustam-se às condições da estrada, da carga e da dirigibilidade.
• Quando se dirige em estradas em bom estado, os amortecedores se ajustam de modo "suave" e proporcionam o máximo conforto na rodagem.
• Quando se toma uma curva em alta velocidade, as forças de amortecimento aumentam automaticamente para garantir segurança extra. De modo similar, no momento em que o carro passa inesperadamente por um buraco, o sistema endurece automaticamente a suspensão e, consequentemente, assegura uma ótima estabilidade de rodagem.” *
Enquanto eu absorvia a explicação boquiaberto, minha esposa perguntou, com a genialidade pragmática que só as mulheres possuem: “E daí, pra que serve tudo isso?”
Meu amigo não se fez de rogado, como bom vendedor, respondeu: Bom, isso permite que você passe o batom sem borrar e tome o seu café enquanto dirige, sem perigo de manchar a roupa.
Naquele momento percebi o tamanho do problema que eu havia arrumado: Para minha mulher aquilo fez todo o sentido...Pior que pra mim também.
Quer vender qualquer coisa, insira seu produto no dia-a-dia do seu comprador.
*Fonte:
Suspensão ativa
Suspensão ativa
Uma suspensão ativa é um tipo de suspensão automotiva em um veículo. Ele usa um sistema de bordo para controlar o movimento vertical das rodas do veículo em relação ao chassi ou carroceria do veículo, em vez da suspensão passiva fornecida por grandes molas, onde o movimento é determinado inteiramente pela superfície da estrada. As chamadas suspensões ativas são divididas em duas classes: suspensões ativas reais e suspensões adaptativas ou semi-ativas. Enquanto as suspensões adaptativas variam apenas a firmeza do amortecedor para corresponder às mudanças das condições dinâmicas ou da estrada, as suspensões ativas usam algum tipo de atuador para levantar e abaixar o chassi independentemente em cada roda. Essas tecnologias permitem que os fabricantes de automóveis alcancem um maior grau de qualidade de condução e manuseio do carro , mantendo os pneus perpendiculares à estrada nas curvas, permitindo melhor tração e controle. Um computador de bordo detecta o movimento do corpo a partir de sensores em todo o veículo e, usando esses dados, controla a ação das suspensões ativas e semiativas. O sistema praticamente elimina a variação de inclinação e rotação da carroceria em muitas situações de direção, incluindo curvas , aceleração e frenagem .
Princípio
figura 1 figura 1 Figura 2 Figura 2 Figura 3 Figura 3 A teoria do Skyhook é que a suspensão ideal deixaria o veículo manter uma postura estável como se estivesse suspenso por um gancho imaginário no céu, não afetado pelas condições da estrada. Uma vez que um skyhook real é obviamente impraticável, [1] os sistemas de suspensão ativa real são baseados em operações de atuador. A linha imaginária (de aceleração vertical zero) é calculada com base no valor fornecido por um sensor de aceleração instalado na carroceria do veículo (ver Figura 3). Os elementos dinâmicos compreendem apenas a mola linear e o amortecedor linear; portanto, nenhum cálculo complicado é necessário. [2] [3] Um veículo entra em contato com o solo através da mola e amortecedor em uma suspensão normal de amortecedor de mola, como na Figura 1. Para atingir o mesmo nível de estabilidade que a teoria Skyhook, o veículo deve entrar em contato com o solo através da mola e a linha imaginária com o amortecedor, como na Figura 2. Teoricamente, no caso em que o coeficiente de amortecimento atinge um valor infinito, o veículo ficará em um estado em que está totalmente fixado à linha imaginária, portanto o veículo não irá balançar.
Ativo
As suspensões ativas, as primeiras a serem introduzidas, usam atuadores separados que podem exercer uma força independente na suspensão para melhorar as características de condução. As desvantagens desse projeto são o alto custo, complicação e massa adicionais do aparelho e a necessidade de manutenção frequente em algumas implementações. A manutenção pode exigir ferramentas especializadas e alguns problemas podem ser difíceis de diagnosticar. Acionamento Hidráulico As suspensões acionadas hidraulicamente são controladas com o uso de sistemas hidráulicos . O primeiro exemplo apareceu em 1954, com a suspensão hidropneumática desenvolvida por Paul Magès na Citroën . A pressão hidráulica é fornecida por uma bomba hidráulica de pistão radial de alta pressão . Os sensores monitoram continuamente o movimento do corpo e o nível de deslocamento do veículo, fornecendo novos dados aos corretores hidráulicos de altura. Em questão de segundos, a suspensão gera forças contrárias para levantar ou abaixar a carroceria. [4] Durante as manobras de direção, o nitrogênio envolto se comprime instantaneamente, oferecendo seis vezes a compressibilidade das molas de aço usadas pelos veículos até então. [5] Na prática, o sistema sempre incorporou as desejáveis características de suspensão autonivelante e suspensão ajustável em altura , com esta última agora vinculada à velocidade do veículo para melhorar o desempenho aerodinâmico , pois o veículo se abaixa em alta velocidade. Este sistema teve um desempenho notável em direção direta, incluindo em superfícies irregulares, mas tinha pouco controle sobre a rigidez de rolamento. [6] Milhões de veículos de produção foram construídos com variações neste sistema. Atuação eletrônica da suspensão hidráulica Colin Chapman desenvolveu o conceito original de gerenciamento de suspensão hidráulica por computador na década de 1980 para melhorar as curvas em carros de corrida. A Lotus montou e desenvolveu um sistema protótipo para um Excel 1985 com suspensão eletro-hidráulica ativa, mas nunca o colocou à venda ao público, embora muitos carros de demonstração tenham sido construídos para outros fabricantes. Os sensores monitoram continuamente o movimento do corpo e o nível de direção do veículo, fornecendo novos dados ao computador. Conforme o computador recebe e processa os dados, ele opera os servos hidráulicos, montados ao lado de cada roda. Quase instantaneamente, a suspensão servo-regulada gera forças contrárias para inclinar o corpo, mergulhar e agachar durante as manobras de direção. A Williams Grand Prix Engineering preparou uma suspensão ativa para carros de F1 em 1992, criando carros de tanto sucesso que a Fédération Internationale de l'Automobile decidiu banir a tecnologia. [7] A Suspensão de Tecnologia Ativa de Computador (CATS) coordena o melhor equilíbrio possível entre a qualidade do passeio e o manuseio, analisando as condições da estrada e fazendo até 3.000 ajustes por segundo nas configurações da suspensão por meio de amortecedores controlados eletronicamente . O Mercedes-Benz CL-Class (C215) de 1999 introduziu o Active Body Control , onde os servos hidráulicos de alta pressão são controlados por computação eletrônica, e esse recurso ainda está disponível. Os veículos podem ser projetados para se inclinar ativamente nas curvas para melhorar o conforto do ocupante. [8] [9] Barra anti-roll ativa A barra estabilizadora ativa fica rígida sob o comando do motorista ou da suspensão Unidade de controle eletrônico (ECU) durante curvas fechadas. O primeiro carro de produção foi o Mitsubishi Mirage Cyborg em 1988. Recuperativo eletromagnético Em carros de produção totalmente ativos controlados eletronicamente, a aplicação de servos e motores elétricos combinados com a computação eletrônica permite curvas planas e reações instantâneas às condições da estrada. A Bose Corporation tem um modelo de prova de conceito. O fundador da Bose, Amar Bose , trabalhou em suspensões exóticas por muitos anos enquanto era professor do MIT. [10] A suspensão eletromagnética ativa usa motores eletromagnéticos lineares presos a cada roda. Apresenta resposta extremamente rápida e permite a regeneração da energia consumida, utilizando os motores como geradores. Isso quase supera os problemas de tempos de resposta lentos e alto consumo de energia dos sistemas hidráulicos. A tecnologia do sistema de suspensão ativa controlada eletronicamente (ECASS) foi patenteada pelo Centro de Eletromecânica da Universidade do Texas na década de 1990 [11] e foi desenvolvida pela L-3 Electronic Systems para uso em veículos militares. [12] O HMMWV equipado com ECASS excedeu as especificações de desempenho para todas as avaliações de desempenho em termos de potência absorvida pelo operador do veículo, estabilidade e manuseio. Roda Ativa O Active Wheel da Michelin de 2004 incorpora um motor de suspensão elétrica integrado que controla a distribuição de torque, tração, manobras de giro, pitch, roll e amortecimento da suspensão para aquela roda, além de um motor elétrico de tração integrado . [13] [14] Sistema de suspensão eletromecânica ativa Audi lançado em 2017. Ele aciona cada roda individualmente e se adapta às condições da estrada. Cada roda possui um motor elétrico que é alimentado pelo sistema elétrico principal de 48 volts. Os componentes adicionais incluem engrenagens, um tubo rotativo junto com uma barra de torção de titânio interna e uma alavanca que exerce até 1.100 Nm (811,3 lb-ft) na suspensão por meio de uma haste de acoplamento . Graças à câmera frontal, o sedan detecta solavancos na estrada logo no início e ajusta de forma preditiva a suspensão ativa. Mesmo antes de o carro atingir um solavanco na estrada, a função de visualização desenvolvida pela Audi transmite a quantidade certa de deslocamento para os atuadores e controla ativamente a suspensão. Os motores controlados por computador podem detectar imperfeições na estrada e podem levantar a suspensão da roda que iria passar por cima da ondulação, ajudando assim a qualidade do passeio. O sistema irá direcionar os motores do lado de fora para empurrar para cima ou para baixo a suspensão durante as curvas. Isso resultará em uma direção mais plana e redução do rolamento da carroceria nas curvas, o que significa uma dinâmica de manuseio mais confiante. [15] [16] [17] [18] [19] [20] [21]
Adaptativo e Semiativo
Os sistemas adaptativos ou semi-ativos podem apenas alterar o coeficiente de amortecimento viscoso do amortecedor e não adicionam energia ao sistema de suspensão. Enquanto as suspensões adaptativas têm geralmente uma resposta de tempo lenta e um número limitado de valores de coeficiente de amortecimento, as suspensões semi-ativas têm resposta de tempo perto de alguns milissegundos e podem fornecer uma ampla gama de valores de amortecimento. Portanto, as suspensões adaptativas normalmente só propõem diferentes modos de condução (conforto, normal, esportivo ...) correspondentes a diferentes coeficientes de amortecimento, enquanto as suspensões semi-ativas modificam o amortecimento em tempo real, dependendo das condições da estrada e da dinâmica do carro. Embora limitada em sua intervenção (por exemplo, a força de controle nunca pode ter uma direção diferente do vetor atual de velocidade da suspensão), suspensões semi-ativas são menos caras de projetar e consomem muito menos energia. Nos últimos tempos, a pesquisa em suspensões semi-ativas continuou a avançar no que diz respeito às suas capacidades, estreitando a lacuna entre os sistemas de suspensão semi-ativos e totalmente ativos. Solenóide / válvula atuada Este tipo é o tipo mais econômico e básico de suspensões semi-ativas. Consistem em uma válvula solenóide que altera a vazão do meio hidráulico no interior do amortecedor , alterando assim as características de amortecimento do arranjo da suspensão. Os solenóides são conectados ao computador de controle, que os envia comandos dependendo do algoritmo de controle (geralmente a chamada técnica "Sky-Hook"). Este tipo de sistema é usado no sistema de suspensão Computer Command Ride (CCR) da Cadillac . O primeiro carro de produção foi o Toyota Soarer com Suspensão Eletrônica Modulada Toyota semi-ativa , de 1983. Amortecedor magnetorheológico Outro método bastante recente incorpora amortecedores magnetoreológicos com a marca MagneRide . Foi inicialmente desenvolvido pela Delphi Corporation para GM e era padrão, como muitas outras novas tecnologias, para Cadillac STS (do modelo 2002) e em alguns outros modelos GM de 2003. Esta foi uma atualização para sistemas semi-ativos ("estrada automática -sensor de suspensões ") usadas em veículos GM de luxo por décadas. Ele permite, em conjunto com computadores modernos mais rápidos, alterar a rigidez de todas as suspensões das rodas de forma independente. Esses amortecedores estão sendo cada vez mais usados nos Estados Unidos e já são alugados para algumas marcas estrangeiras, principalmente em veículos mais caros. Este sistema esteve em desenvolvimento por 25 anos. O fluido amortecedor contém partículas metálicas. Por meio do computador de bordo, as características de conformidade dos amortecedores são controladas por um eletroímã . Essencialmente, aumentar o fluxo de corrente no circuito magnético amortecedor aumenta o fluxo magnético do circuito. Isso, por sua vez, faz com que as partículas de metal mudem seu alinhamento, o que aumenta a viscosidade do fluido, aumentando assim as taxas de compressão / recuperação, enquanto uma diminuição suaviza o efeito dos amortecedores, alinhando as partículas na direção oposta. Se imaginarmos as partículas de metal como pratos de jantar, enquanto alinhadas de forma que fiquem na borda, a viscosidade é minimizada. Na outra extremidade do espectro, eles estarão alinhados a 90 graus, de forma plana. Tornando assim o fluido muito mais viscoso. É o campo elétrico produzido pelo eletroímã que altera o alinhamento das partículas metálicas. As informações dos sensores das rodas (sobre extensão da suspensão), direção, sensores de aceleração - e outros dados, são usadas para calcular a rigidez ideal naquele momento. A rápida reação do sistema (milissegundos) permite, por exemplo, tornar mais suave a passagem de uma única roda sobre um solavanco na estrada em um determinado instante do tempo.
Veículos de produção
Por ano civil: 1954: Citroen Traction Avant 15-6H :, suspensão hidropneumática autonivelante Citroen nas rodas traseiras.
1955: Citroën DS , suspensão hidropneumática autonivelante Citroen nas quatro rodas.
1957: Cadillac Eldorado Brougham : estreia da suspensão a ar autonivelante GM
1967: Rolls Royce Silver Shadow Suspensão hidropneumática com suporte de carga parcial nas quatro rodas. Sistema frontal excluído em 1969
1970: Citroën SM , suspensão hidropneumática autonivelante Citroen nas quatro rodas.
1970: Citroën GS , suspensão hidropneumática autonivelante Citroen nas quatro rodas.
1974: Citroën CX , suspensão hidropneumática autonivelante Citroen nas quatro rodas.
1975: Mercedes Benz 450 SEL 6.9 Suspensão hidropneumática nas quatro rodas.
1982: Citroën BX , suspensão hidropneumática autonivelante Citroen nas quatro rodas.
1979: Suspensão hidropneumática Mercedes Benz W126 nas quatro rodas como uma opção nos modelos LWB v8
1983: Toyota Soarer : estreia da semi-ativa Toyota Electronic Modulated Suspension (TEMS) [22]
1985 Mercedes Benz 190E 2.3-16 Suporte de carga parcial Suspensão hidropneumática nas quatro rodas como opção no modelo 16v. Padrão nos modelos Evo 1 e Evo 2
1986: Toyota Soarer : primeira suspensão pneumática totalmente controlada eletronicamente (TEMS) do mundo (constante da mola, força de atenuação variável) instalada
1986: Suspensão hidropneumática Mercedes Benz W126 nas quatro rodas com amortecimento adaptativo controlado eletronicamente como uma opção nos modelos LWB v8
1987: Mitsubishi Galant : VR-4 apresenta Suspensão Controlada Ativa (ECS Dinâmico). O sistema permite um passeio confortável e estabilidade de manuseio, ajustando automaticamente a altura do veículo e a força de amortecimento.
1989: Citroën XM - autonivelante, semi-ativo Hydractive nas quatro rodas com taxas de mola e amortecedores ajustados automaticamente.
1989: Suspensão hidropneumática de suporte de carga parcial Mercedes Benz R129 com taxas de mola ajustadas automaticamente e amortecedores como uma opção (ADS)
1990: * Primeira suspensão semi-ativa examinando a estrada à frente ( sonar ) - 1990 Nissan Leopard / Nissan Cedric / Nissan Maxima / Nissan J30 DUET-SS Super Sonic Suspension [23]
1990: Infiniti Q45 "Full-Active Suspension (FAS)", sistema de suspensão ativa, embora ainda tivesse molas helicoidais convencionais
1992: Toyota Celica ( Suspensão Toyota Eletronicamente Modulada )
1992: Citroën Xantia VSX - autonivelante, semi-ativo Hydractive 2 nas quatro rodas, com molas e amortecedores ajustados automaticamente.
1993: Cadillac , vários modelos com suspensão com sensor de estrada RSS . RSS estava disponível em sistemas padrão e CVRSS ( suspensão com detecção de estrada continuamente variável ). Ele monitorou as taxas de amortecimento dos amortecedores a cada 15 milissegundos , selecionando entre duas configurações.
1994: Toyota Celsior introduziu a primeira suspensão pneumática Skyhook [24]
1994: Citroën Xantia Activa - autonivelante, totalmente ativo Hydractive nas quatro rodas com barras estabilizadoras hidráulicas e taxas de mola e amortecedores ajustados automaticamente.
1998: Land Rover Discovery série 2 - Melhoramento ativo nas curvas; um sistema de barra anti-roll hidráulico controlado eletronicamente foi instalado em algumas versões, o que reduziu o rolamento nas curvas.
1999: Mercedes Benz C215 Auto-nivelamento hidráulico totalmente ativo Controle ativo do corpo . Disponível nos modelos S, CL e SL
2002: Cadillac Seville STS, primeiro MagneRide [25]
2004: Volvo S60 R e V70 R (Four-C, um nome curto para "Conceito de chassi continuamente controlado", semi-ativo)
2013: Mercedes Benz W222 : Controle de corpo mágico opcional . Sistema hidráulico autonivelante totalmente ativo com eletrônica de varredura da superfície da estrada
2019: modelo Toyota Avalon Touring (Suspensão Variável Adaptável (AVS))
Veja também
Suspensão Toyota Active Control
Suspensão hidropneumática
Controle ativo do corpo
Referências
Suspensão do piloto / amortecimento adaptativo: Trabalho
Com todas as técnicas destinadas a melhorar e aperfeiçoar a suspensão dos nossos carros, há algo a perder ... Aqui veremos o que significa uma chamada suspensão pilotada (ou adaptativa), um sistema mais difundido do que a suspensão ativa (pneumática , hidropneumático ou mesmo hidráulico com suspensão Mercedes ABC) porque é mais barato de produzir. Mais exatamente, seria mais correto falar de amortecimento controlado porque são os pistões do amortecedor que estão sob controle aqui, e não a suspensão (molas). Porém, sabendo que os amortecedores "controlam" a suspensão (velocidade de deslocamento de cima para baixo), podemos indiretamente dizer que é uma suspensão controlada ... Quem não tem muito conhecimento sobre suspensão deve dar um passeio aqui . Observe também que um amortecimento controlado pode ser montado em paralelo com uma suspensão a ar, e isso geralmente ocorre no topo da faixa. Esses dois sistemas não são, portanto, oponíveis (molas pneumáticas e amortecedores controlados), pois podem trabalhar juntos e cada um tem uma função diferente.
Um pequeno lembrete sobre o que é um amortecedor
Um amortecedor é um pistão formado por duas câmaras cheias de óleo. Estes se comunicam através de pequenos orifícios / canais pelos quais o óleo pode circular (de uma câmara para outra, portanto). A sua função é moderar a velocidade de deslocação do trem de rodagem, pois a mola não é exemplar nesta área ... Deve-se, portanto, entender que não carregam (suspendem) o carro, mas atuam como policiais em termos de velocidade de viagem. Vejamos um exemplo simples: a bomba de bicicleta. Este último é composto por duas partes aninhadas como um pistão. Assim, posso ir e voltar sem nenhum problema, como acontece com um amortecedor. Porém, se quero acelerar o passo, percebo que não posso ir muito rápido porque ainda leva um pouco de tempo para o ar escapar (o fenômeno é ainda mais importante quando eu inflo minha roda). Portanto, há uma pequena resistência que ocorre quando eu começo a ir mais rápido em termos de ir e vir. Bem, o amortecedor faz a mesma coisa, exceto que aqui, no caso de amortecedores pilotados, a resistência poderá ser modulada. Vamos ver algumas técnicas que permitem que você faça isso.
O que uma suspensão eletrônica pode fazer e para que serve?
Além de poder ajustar a afinação da suspensão e consequentemente adaptar o conforto, o sistema eletrônico aproveita para ir muito mais longe ... Na verdade, poder mudar as leis de amortecimento de cada um dos amortecedores em uma fração de segundo faz é possível muitas coisas ... Aqui estão os principais:
Nas curvas, a calibração da suspensão torna-se rígida no lado que bate para limitar o esmagamento do carro nos apoios. Como resultado, o carro tende a limitar o pitch and roll.
Em estradas degradadas, o sistema amolece e enrijece cada amortecedor várias vezes por segundo. Como resultado, graças a um computador, os amortecedores são ajustados rapidamente para limitar os solavancos e os movimentos do corpo para cima e para baixo. Além disso, tudo é feito para manter o carro o máximo possível com o famoso efeito Skyhook.
A segurança é aumentada no caso de manobras repentinas do tipo evasão. ESP e ABS trabalham com a suspensão para otimizar ainda mais a maneira como o carro se comportará. O sistema, portanto, torna possível alterar a lei de amortecimento de acordo com o nível de depressão do pistão. Se, por exemplo, estou mais perto do stop, é preferível que o amortecimento enrijeça ainda mais. Em suma, a progressividade do amortecimento pode ser modulada e controlada em tempo real, dependendo da situação e do nível de esmagamento da suspensão. Trata-se então de uma suspensão inteligente que reage de acordo com o contexto, e não de um dispositivo passivo que reage sempre da mesma forma, sejam quais forem as condições.
Примеры
Assim que uma das rodas "bate" em uma imperfeição, o sistema reage ao quarto de segundo para adequar o ajuste do amortecedor. Aqui, o sistema suaviza o amortecedor para que você sinta menos impacto. No entanto, se este último for muito grande, o amortecimento será reforçado antes de você bater no batente. O carro ainda será sacudido, mas não há escolha real se você deseja evitar quebrar algo.
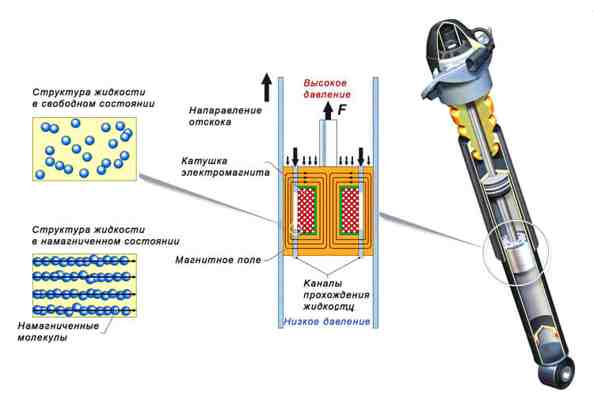
Sistema de amortecimento magnético controlado
Você vai entender, o objetivo aqui é ser capaz de modular a resistência do deslocamento do pistão do amortecedor modulando o fluxo de óleo que vai de cima para baixo. Quanto mais limitado, mais seco é o amortecimento. Aqui, os engenheiros foram muito espertos (com frequência), pois tiveram a ideia de adicionar partículas magnetizadas ao óleo. Graças a eletroímãs (ímã ativado por eletricidade) colocados nos canais de circulação, a velocidade do fluxo pode ser ajustada. Quanto mais suco houver, mais poderoso será o ímã, o que terá uma influência ainda mais forte nas partículas presentes em suspensão no óleo. O diagrama abaixo ilustra isso.
O alinhamento das partículas magnéticas permite bloquear os tubos em maior ou menor grau e, portanto, tornar o pistão mais ou menos rígido em termos de deslocamento.
Sistema de amortecimento adaptativo por válvula
O princípio é o mesmo, exceto que aqui não modificamos a fluidez do líquido graças às partículas metálicas. Na verdade, é simplesmente uma questão de controlar pequenas válvulas colocadas nos canais de circulação. Portanto, é muito simples abrir ou fechar torneiras mais ou menos pequenas. Existem várias disposições, como sempre ...
A velocidade do fluxo é efetuada pelo compartimento à esquerda. Parte do óleo passa por ele e basta integrar um sistema de válvulas para modular a velocidade com que o óleo pode passar de baixo para cima. Desta vez, as válvulas são integradas ao pistão do amortecedor. Lembro que eles são controlados eletronicamente, mesmo que isso não esteja claramente indicado no diagrama.
Seus problemas relatados
Aqui estão os depoimentos retirados automaticamente das opiniões postadas nas fichas de teste do site.
Ford Mondeo 3 (2007-2014)
2.0 TDCI 163 hp caixa de câmbio manual 6, titânio, 268000 kms, 2010, aros de liga leve de 17 ″, teto solar, GPS, tela sensível ao toque. : amortecedores pilotado para ser substituído "não dado", mas necessário. Adquirido com 268000 kms, junta injetora solta, substituição das 4 juntas, aproveito para refazer a distribuição completa com bomba d'água, bem como a correia acessória e os roletes , mais a mudança de óleo, por 1200 €, com um grande problema de extração de um injetor, acho a conta muito razoável. amortecedores deveria ter sido substituída pelo vendedor, uma garagem, mas não tendo disponibilidade disponível, espero que cumpra a sua palavra.amortecedores pilotado
Audi A7 (2010-2017)
2.0 TFSI 252 canais Boite S-tronic, 27.000 kms, 12/2017, 255 R18, SLINE : pingenteé pilotado - eu tive que mudar o 2 pingentes traseiros após 30.000 km (em 06/2021, um pouco mais de 3 anos após a compra) porque eles se tornaram porosos (mensagem exibida: veículo muito baixo. Distância ao solo restrita)
DS DS7 Crossback (2018)
2.0 BlueHDI 180 hp 100000 : Eu tenho 1 novo DS7 que agora tem 100000 kms e apenas problemas desde a compra
Comments